
FFT GYRO
FFT GYRO
Making easier to work with drones.
A Simple but Powerful Tool
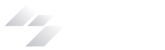
The system is a special type of gyroscope that can move freely in the roll, pitch, and yaw axis without any limitation.
For All Sizes
The center of the gyroscope can hold different types and sizes of multi-rotors. A wide set of different series for all kinds of UAVs, from small racing drones to big industrial drones.
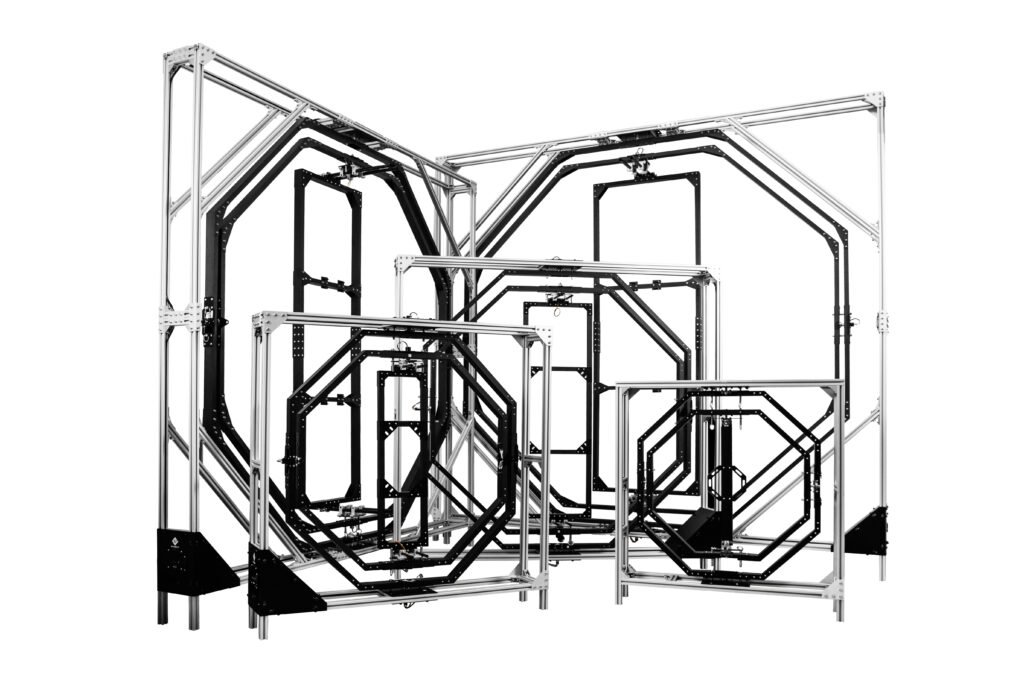
Safe
With a rig like this you could “fly” your drone anywhere without the risk of a collision.
Applications

Teaching Students
Bring real drones into the student's classroom and teach them the principles, uses and the operation of UAVs, in a completly safe environment.
Pilot Training
Train new pilots in any indoor facility and give the oportunity to more experience pilots to practice maneuvers without the need of going to an outdoor location.

Drone Integrators Tool
Bring this tool to the field to balance the weight distribution of the aircraft payload, tune the PID parameters and calibrate the on-board sensors before flight to avoid accidents.

PID & Sensor Calibration
Perform the On-board calibrations (IMU, gyroscopes and magnetometer) easly. Tune the PID parameters by trial and error without the stress of making a mistake.

Showcase Products
Add a dynamic touch to your company and create an awesome experience for your customers by letting them "fly" your products, without putting them at risk.
Research & Development
Empower your R&D department to take that leap from investigation to experimentation and implementation in real-drones, performing projects easier and faster.
and more...
On-board Sensors Calibration
The center of rotation of the drone can be aligned with the center of rotation of the gyroscope allowing the drone to rotate about it’s true center of rotation (the measurement point of the IMU). All the axis can be locked individually, so it’s easy to perform calibrations of the on-board sensors of the aircraft (IMU, gyroscopes, magnetometer, etc.).
Tuning PID Parameters
Tuning PID parameters has never been easier to perform. With a well-built device like this, there is no need to be an expert pilot to tune the PID parameters of the aircraft controller. Just put the drone on the FFT GYRO, align the centers of rotations and start tuning the parameters without the stress of making a mistake.
High Quality
For lightness and rigidity only the best materials are used: carbon fiber and aluminum. With little to non-existing magnetic interference to the magnetometer, these materials provide a strong and rigid structure to the gimbals while adding minimum inertia to the aircraft’s rotation dynamics. If the PID parameters perform well with the added inertia, then the PID will be able to withstand external perturbations when the drone is in a real free flight.
Add-Ons
Angular position sensors can be added to each axis. With higher resolution, faster sampling and better accuracy, rotation dynamics can be measured with precision. The sensors are frictionless (magnetic), very small and light to avoid adding inertia to the aircraft’s dynamics.
Also, the encoders can be replaced with smart motors to fully automate the gyroscope. This is useful to control the position, velocity, or torque of each axis, so calibrations of the autopilot can become an automatic process.
Software

FFT GYRO Test Tool
Use our Open-source interface to interact with the FFT GYRO right away, and modify the source code to build your own applications.
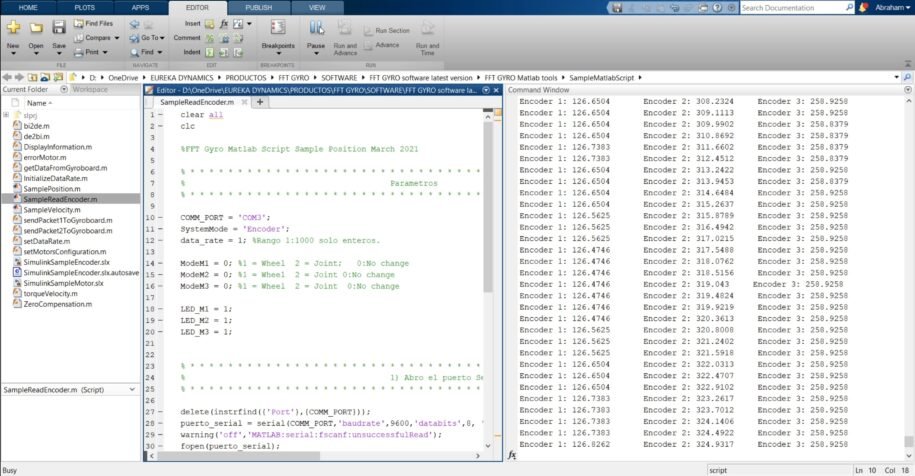
MATLAB scripts
We have ready-to-use MATLAB scripts for the most basic aplications with the FFT GYRO. Readings for the encoders and read/write comands for the motors.
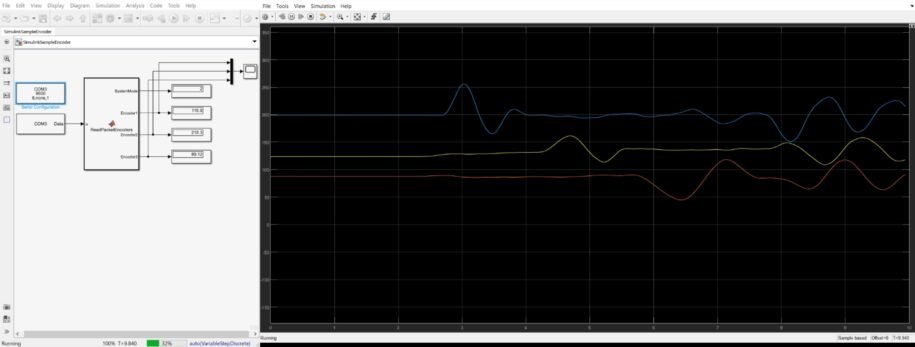
Simulink models
Ready-to-use Simulink models are also available. Modify them to fit your R&D projects and help you implement your work in real-drones.
A Multi-purpose Tool
The FFT GYRO is essentially useful for everyone that works with drones or UAVs.
From beginner users that want to learn how to fly, re-sellers that want to engage better with their clients, to drone development companies that want to keep leading the market, it comes out as a solution for a wide variety of problems that are very common in this field.
The FFT GYRO is not only a tool for research and development. It is the tool that makes easy to work with drones and helps to stay ahead of the game.
Order Your FFT GYRO Today
The FFT GYRO is available for orders NOW. Please fill the next form and our team will reach out with a quotation.